
کنترل ارتفاع یک جسم پرنده
پروژه کنترل ارتفاع یک جسم پرنده ، در این پروژه کنترل کننده LQR را برای یک جسم پرنده طراحی طراحی کرده ایم و آن را در متلب شبیه سازی کرده ایم (پیاده سازی در سیمولینک و شبیه سازی در محیط متلب به صورت ام-فایل).
شبیه سازی کنترل ارتفاع یک جسم پرنده در سیمولینک و محیط متلب
در این پروژه کنترل کننده LQR را برای یک جسم پرنده طراحی طراحی کرده ایم و آن را در سیمولینک و محیط متلب شبیه سازی کرده ایم.برای این کار ابتدا معادلات دینامیکی سیستم کنترلی را بدست آورده و آن را به فرم فضای حالت نوشته ایم (در داکیومنت پروژه موجود می باشد).
در ادامه و در داکیومنت پروژه توضیحات مربوط به کنترل کننده LQR را به همراه بلوک دیاگرام کنترل کننده LQR برای سیستم مربوطه آورده ایم.(توضیحات و بلوک دیاگرام مذکور در داکیومنت پروژه آورده شده است).
همچنین بخوانید: کنترل SDRE بازوی ربات و مقایسه با LQR
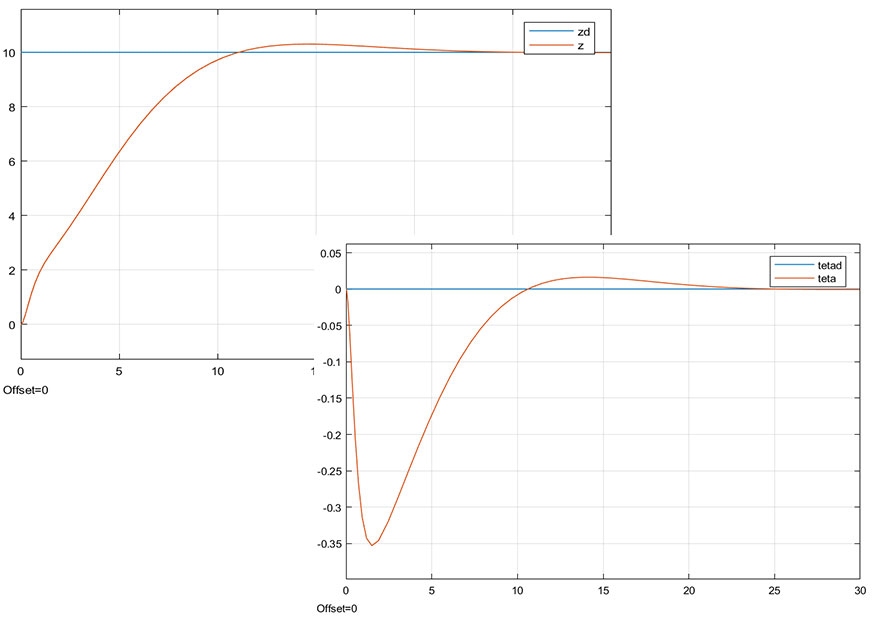
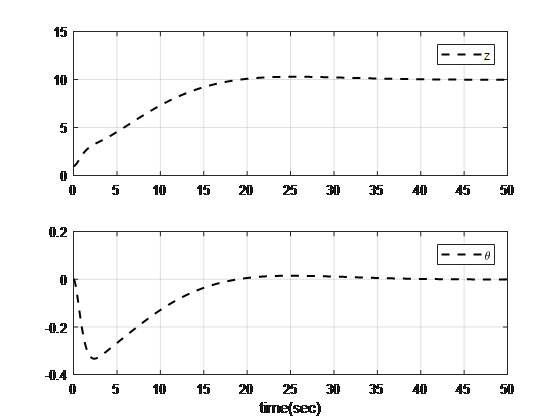
در این شبیه سازی می خواهیم جسم پرنده تا ارتفاع ۱۰ متر اوج بگیرد و زاویه ی حول مرکز آن صفر شود.پارامتر های این جسم پرنده بصورت پیش فرض مقادیری نوشته شده است که شما می توانید آن را در سورس کد پروژه تغییر دهید.
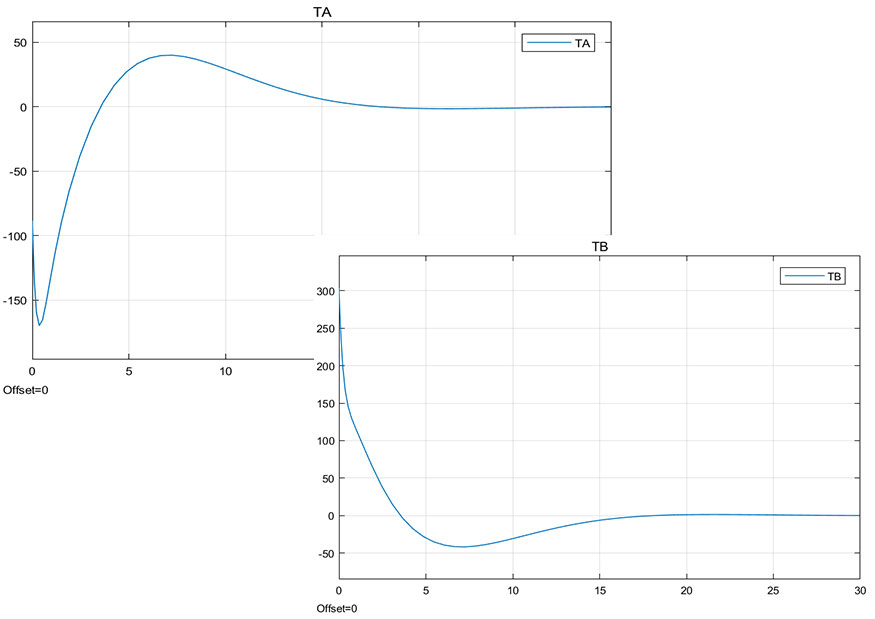
این پروژه هم در سیمولینک پیاده سازی شده است و هم در محیط متلب و به صورت ام فایل.و بعد از اجرای سیمولینک و کدهای ام فایل متلب مشاهده خواهید کرد که نتایج سیمولینک و ام فایل متلب یکسان است.در ادامه تصاویری از خروجی این پروژه را مشاهده می کنید.
تصاویر خروجی پروژه
همچنین بخوانید: شبیه سازی مقاله کنترل زمان محدود برای فضاپیما با رفتار غیرخطی بر اساس روش مد لغزشی ترمینال با متلب
نکته:
کارشناسان وب سایت MATLABDL قادر به انجام پروژه در زمینه های مشابه نیز می باشند.
قیمت پروژه: ۱۴۹۰۰۰ تومان
حجم : ۲٫۲۵۰ مگابایت
توضیحات : این فایل شامل کدهای متلب به همراه توضیحلت مختصری در قالبword و pdf می باشد که در اختیار شما قرار داده می شود.
منبع : مطلب دی ال
رمز فایل : www.matlabdl.com
(این پروژه به صورت اختصاصی توسط محققان مطلب دی ال انجام شده است )



دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.